热门软件
关注最多
QGroundControl(简称QGC)作为一款专业的开源地面站软件,专注于为无人机及自动驾驶系统提供全面的控制解决方案。这款跨平台软件兼容Windows、macOS、Linux等桌面系统,同时支持Android和iOS移动设备。由Dronecode基金会主导开发,QGC凭借其直观的操作界面和模块化设计,在飞行控制、任务规划、参数调整等核心功能上表现出色。无论是无人机爱好者、科研人员还是专业飞手,都能通过其丰富的定制选项找到适合自己的工作方式。软件深度适配PX4和ArduPilot等主流飞控系统,并通过插件机制实现功能扩展。
作为Dronecode基金会官方推出的开源项目,QGroundControl为无人机操作提供了端到端的解决方案。该软件完美兼容PX4和ArduPilot两大飞控平台,覆盖从Windows到移动端的全平台支持。其特色在于将复杂的飞行控制转化为可视化操作,包括三维航点规划、实时遥测监控、飞行日志分析等专业功能。开源架构不仅允许用户深度定制,更依托活跃的开发者社区保持持续进化。从教学科研到商业应用,QGC正成为无人机领域不可或缺的智能控制中枢。
全面兼容PX4/ArduPilot等主流飞控系统
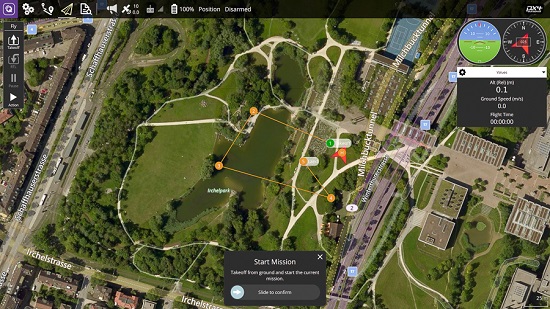
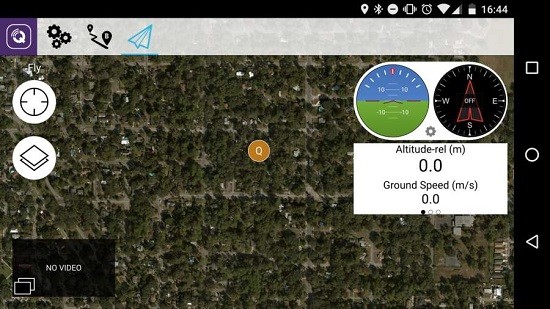
智能航点规划与可视化任务编辑
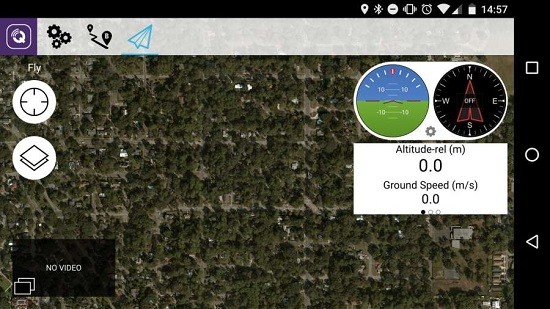
实时飞行数据仪表盘与传感器监控
集成Google地图/OpenStreetMap等多源地图
专业级飞行数据记录与分析套件
低延迟视频流传输与监控
模块化UI设计支持自定义布局
多语言界面适配全球用户
开源免费+活跃开发者社区
真正的全平台跨设备支持
人性化的交互设计
可定制程度媲美商业软件
广泛的硬件兼容性
智能化任务规划系统
实时预警与状态监控
持续迭代的技术前沿产品
开放源代码的开发者生态
完善的文档与教程体系
覆盖从新手到专家的用户群体
灵活的插件架构设计
多机编队协同作业支持
离线地图应对复杂环境
丰富的外设扩展能力
全球范围内的高度认可
界面逻辑清晰,学习曲线平缓
功能覆盖无人机全场景应用
开源模式显著降低使用成本
跨平台运行稳定流畅
航点编辑支持复杂飞行路径
数据反馈精准及时
社区响应快速高效
版本更新带来持续优化
新增PX4最新固件适配
地图引擎性能优化
扩展语言本地化支持
飞行日志分析工具升级
增强视频传输稳定性
多机控制功能强化
扩展插件开发接口
移动端性能显著提升

v4.8/102.76MB
其他用户还下载了



























